Observation précise de la déformation de la Terre à long terme : nouveau regard approfondi sur l’impact des discontinuités de position GNSS
Une nouvelle étude montre que l’impact des discontinuités dans les séries de position GNSS est bien plus inquiétant que ce qui était connu auparavant avec un impact grave sur l’observabilité de la déformation de la Terre à long terme.
Les Systèmes Globaux de Navigation par Satellite (GNSS) sont largement utilisées aujourd’hui pour obtenir la position d’un point sur la surface de la Terre à tout moment. Aujourd’hui, l’état de l’art de la technique nous permet d’estimer la position dans un repère global avec une précision de l’ordre de quelques mm pour des objets qui bougent lentement, c’est-à-dire, des objets considérés statiques pendant au moins une journée. Grâce à des instruments GNSS permanents qui observent de façon continue pendant des années, on arrive à déterminer des vitesses de déplacement avec des précisions typiques au niveau de plusieurs dixièmes de mm/an, par rapport à un repère global. Dû à la géométrie de l’observation GNSS, la position verticale est toujours dégradée d’un facteur d’environ 3 par rapport à l’horizontale.
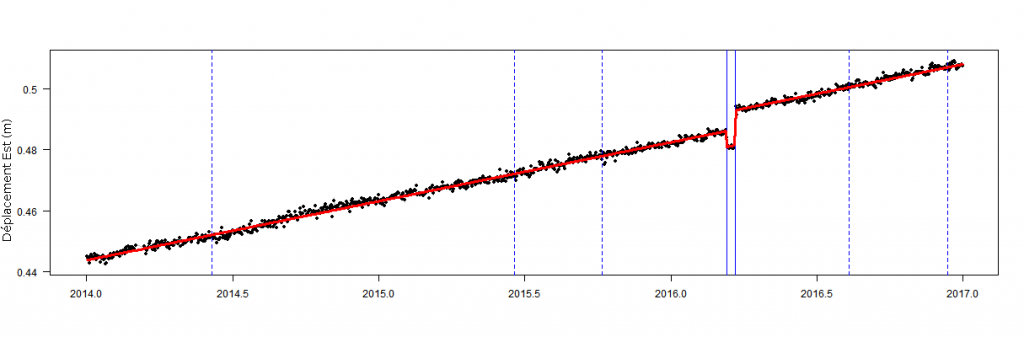
Pour des objets qui se déplacent très lentement, comme les Pyrénées par exemple, cette précision n’est pas suffisante et doit être améliorée. Ceci est théoriquement possible, mais en pratique, deux phénomènes nous l’empêchent encore aujourd’hui : le fait que les erreurs de positionnement sont corrélées dans le temps et le fait que, en réalité, les observations ne se fassent pas de façon tout à fait continuée. En effet, même les séries de position des stations GNSS le plus stables au monde contiennent des sauts ou discontinuités de position, c.-à-d., des changements instantanés de la position estimée, réels dû aux séismes, mais aussi apparents dû aux changements instrumentaux ou de l’environnement de l’instrument GNSS (voir Fig. 1). En France métropolitaine, les discontinuités sont généralement provoquées par des changements de l’instrument quand il y a une panne ou il y a une nouvelle version plus avancée (nouveaux signaux GNSS ou nouveau logiciel récepteur). Les discontinuités GNSS, avec indépendance de leur origine de de leur magnitude, réduisent la précision de la vitesse estimée avec un impact qui dépende, généralement, du taux de discontinuités dans les séries de position. Dans le cadre spécifique des séries de position GNSS issues des campagnes d’observation, le nombre potentiel de discontinuités est logiquement maximisé dû à l’installation temporaire des instruments, souvent pendant la période estivale, et à l’utilisation de matériel différent à chaque répétition.
En ce qui concerne la corrélation des erreurs de position, communément dénommé comme bruit corrélé ou coloré, la limitation vient du fait qu’il est difficile de séparer la vitesse tectonique du bruit corrélé sur une période de temps très longe. L’estimation de la vitesse tectonique absorbe une partie du bruit introduisant ainsi une erreur de vitesse estimée. Les processus à l’origine du bruit corrélé dans les séries de position GNSS, soit « naturel », soit créé par la complexité des observations GNSS elles-mêmes, n’a pas encore été identifié, en dépit des efforts de la communauté géodésique, et GNSS en particulier, pour réduire les erreurs et améliorer les positions estimées. Néanmoins, on peut caractériser le bruit corrélé existant dans une série grâce à des modèles de bruit prédéfinis (p.ex., bruit de scintillation ou marche aléatoire) et puis utiliser cette information pour estimer l’incertitude de vitesse qui doit accompagner la valeur biaisée de la vitesse elle-même. Le modèle de bruit le plus utilisé pour les séries de position GNSS est celui du bruit de scintillation, appelé aussi bruit rose par similitude avec la lumière produite par une densité spectrale similaire, c.-à-d., à mi-chemin entre le bruit blanc et la marche aléatoire (appelée aussi bruit rouge ou brownien). Le bruit de scintillation augmente l’incertitude de vitesse par rapport au bruit blanc classique et cela nous permet, au moins, d’éviter une estimation de vitesse qui serait biaisée si l’on ne tient pas en compte de l’existence de la corrélation temporelle des séries de position GNSS.
En ce qui concerne les discontinuités de position GNSS, ce sujet a été récemment revisité par des chercheurs du GET (Université de Toulouse, CNES, CNRS, IRD) en collaboration avec des chercheurs américains du NGS (NOAA). Ils ont montré que l’impact des discontinuités est bien plus sévère que ce qui était communément connu. Contrairement aux conclusions d’autres publications récentes à ce sujet, ils ont confirmé que, non seulement les discontinuités sont probablement l’une des limitations les plus importantes pour l’estimation des vitesses précises, mais qu’elles ont aussi un impact dramatique sur notre capacité pour caractériser le bruit corrélé dans les séries, notamment sa couleur. La couleur du bruit GNSS devient alors caméléonique selon la quantité de discontinuités dans la série. Ce dernier point se traduit par deux types d’impact négatif des discontinuités.
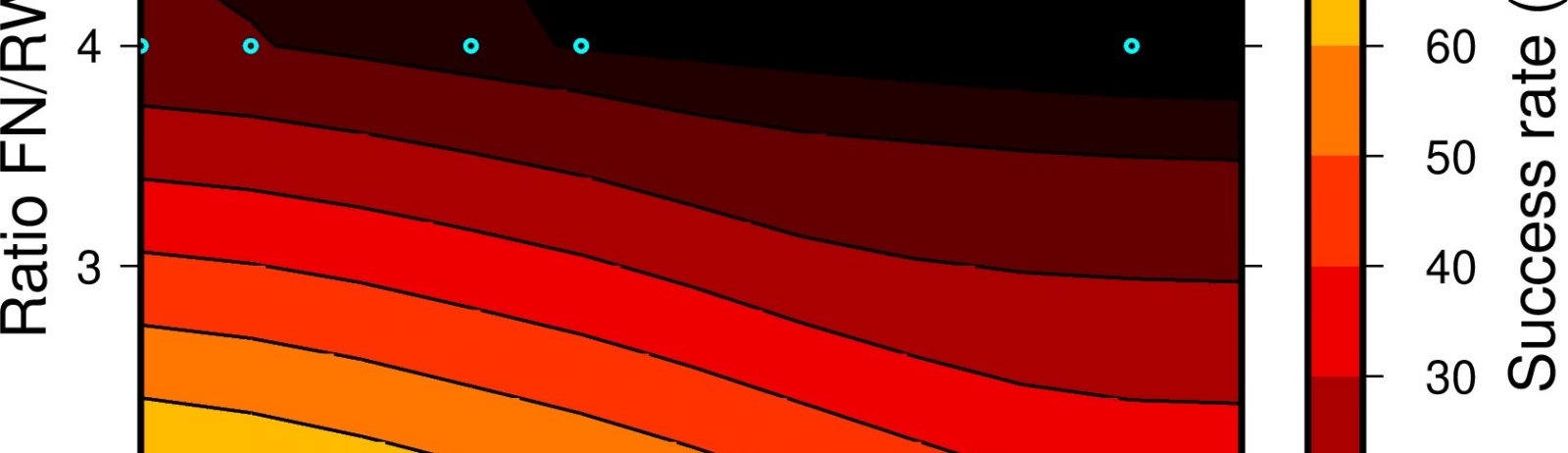
Premièrement, les discontinuités nous amènent à une sous-estimation de l’incertitude des vitesses car le modèle de bruit de scintillation ajusté sera inexact et d’autres types de bruit, comme la marche aléatoire, seront très difficilement détectables (voir Fig. 2). Les chercheurs ont conclu qu’il est fort probable que les séries GNSS continent une quantité de bruit sous forme de marche aléatoire non négligeable qui n’a jamais été détectée auparavant dans les solutions GNSS globales en partie dû à l’effet des discontinuités présentes dans les séries. Le fait d’inclure la marche aléatoire dans le modèle de bruit corrélé, même en petites quantités, augmente l’incertitude de la vitesse estimée de façon très importante.
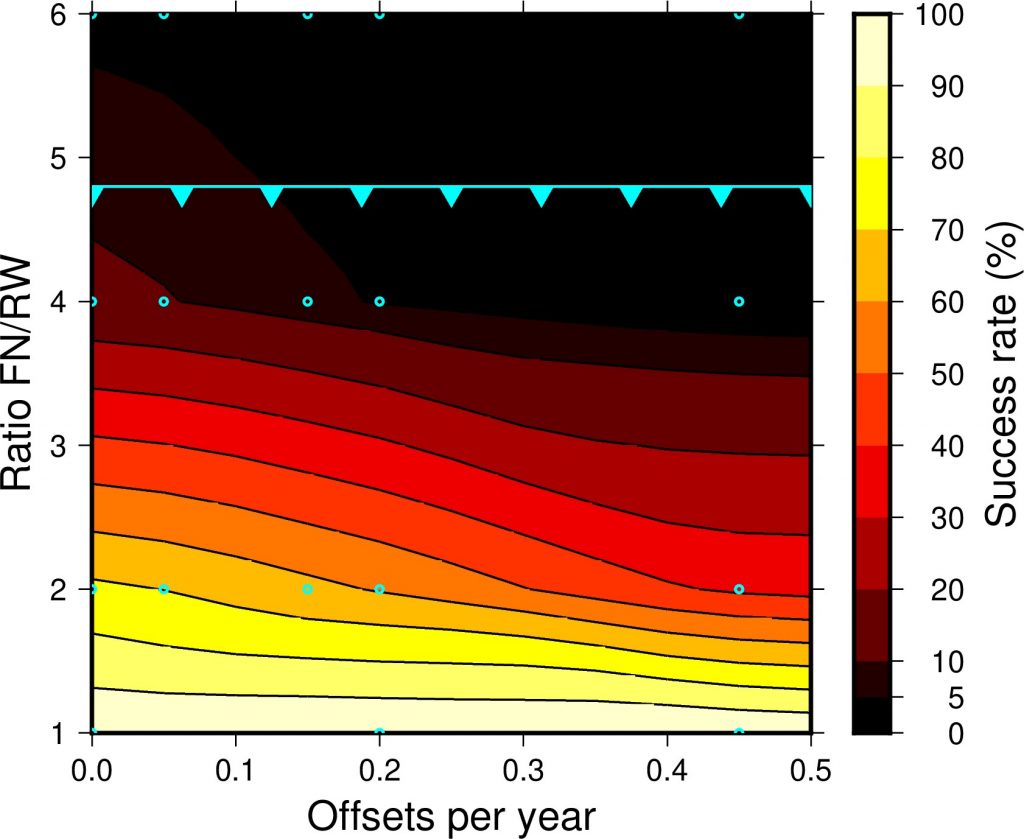
Deuxièmement, au-delà de l’impact dramatique qu’elles ont sur l’estimation des vitesses tectoniques, les discontinuités de position posent une limitation importante pour détecter et quantifier d’autre processus de déformation de la Terre sur des longues périodes. Des exemples incluent des phénomènes de déformation tectonique transitoire ou des phénomènes de déformation périodiques comme le signal à ~5.9 années qui a été suggéré par des publications récentes. L’effet des discontinuités récurrentes tous les 6 ans ou plus fréquemment, ce qui est assez typique des séries GNSS, rendre pratiquement impossible la détection de ce signal.
Dans l’intérêt de l’apport scientifique des séries GNSS longues et de qualité pour l’étude de la déformation de la Terre à long terme, il est impératif de réduire la quantité de discontinuités de position dans les séries GNSS au strictement nécessaire, c.-à-d., des pannes instrumentales uniquement. Ceci implique aussi l’utilisation des algorithmes de détection automatique de discontinuités qui ont généralement tendance à ajouter des fausses discontinuités. Dans tous les cas, dès qu’un changement instrumental doit se faire sur une station GNSS, il est probablement préférable de déterminer in situ le changement apparent de position au lieu de l’estimer à posteriori dans la série temporelle, c’est-à-dire, réparer la discontinuité dans la série au lieu de l’ajuster avec la vitesse. Le bénéfice potentiel de cette approche est en cours d’être évalué à fin de pouvoir émettre une recommandation plus détaillée.